Ngày 03/01/2017 My wedding:)- Du lịch Nikko tochigi
Yêu là chết ở trong lòng một ít
Vì mấy khi yêu mà chắc đã được yêu
Lần cuối Bố nhìn thấy biển
Kỷ niệm sầm sơn 2015
Lễ Tốt Nghiệp Đại Học 02/07/2013
Không bao giờ là bế tắc là tuyệt vọng
Một khi bạn mong muốn nó tốt hơn
Một khi bạn không bỏ cuộc
Một khi bạn còn cố gắng!
Hành trình xanh và những người Bạn
Cuộc vui nào rồi cũng đến lúc tàn canh.
Nỗi buồn nào rồi cũng vơi dần theo năm tháng.
Chỉ có thời gian tấm lòng là Vô hạn.
Dù ở phương trời nào,ta vẫn nhớ về nhau.
Đám cưới anh Trai
Hãy luôn tin tưởng ở con Mẹ nhé!
Nhảm Nhí Nhạt Nhẽo
Ba hòn đá tảng của sự học là :quan sát nhiều từng trải nhiều và nghiên cứu nhiều
TP.HCM
Đời người và những chuyến đi.
Sinh Nhật con gái
Sinh Nhật Gái Yêu
Automation 2G
Nơi khơi dậy đam mê
Anh Em Thác Nôi
Cách duy nhất để có bạn bè là chính bản thân mình phải là một người bạn
Kỉ niệm ae thân thiết
Vạn Sự Khởi đầu nan
"Hành trình vạn dặm bắt đầu từ những bước đi đầu tiên"
せんりのみちもいっぽから
DANH NGÔN
Hành trình vạn dặm bắt đầu từ một bước chân - Lão Tử
CÁC LOẠI CẢM BIẾN TRONG HỆ THỐNG HỖ TRỢ LÁI TIÊN TIẾN ADAS
Cảm biến ADAS đề cập đến bất kỳ cảm biến nào được sử dụng trong các hệ thống hỗ trợ lái xe tiên tiến (ADAS). ADAS là các tính năng trong các phương tiện hiện đại giúp người lái thực hiện các nhiệm vụ như tự động đỗ xe, giữ làn đường, tránh va chạm và tự lái.
Các cảm biến ADAS có thể được phân thành các loại khác nhau:
1. Cảm biến radar: sử dụng sóng vô tuyến để đo khoảng cách, tốc độ và hướng của các vật thể xung quanh phương tiện. Chúng rất hữu ích cho các ứng dụng tầm xa như kiểm soát hành trình thích ứng và phát hiện điểm mù.
2. Cảm biến Lidar: sử dụng chùm tia laser để đo khoảng cách và tạo bản đồ 3D về môi trường xung quanh xe. Họ cung cấp dữ liệu có độ phân giải cao và có thể phát hiện các vạch kẻ đường và người đi bộ.
3.Cảm biến camera: thu thập dữ liệu trực quan và xử lý nó để xác định biển báo đường bộ, đèn giao thông, chướng ngại vật và hơn thế nữa. Chúng cung cấp khả năng nhận dạng màu sắc và có thể hoạt động trong các điều kiện ánh sáng khác nhau.
4. Cảm biến siêu âm: sử dụng sóng âm thanh để phát hiện các vật thể ở gần nhau. Chúng chủ yếu được sử dụng để hỗ trợ đỗ xe và phát hiện chướng ngại vật.
5. Cảm biến hồng ngoại: phát hiện các dấu hiệu nhiệt và có thể xác định các vật thể ấm như động vật hoặc con người trong điều kiện tầm nhìn thấp. Chúng thường được sử dụng để nhìn ban đêm và phát hiện động vật băng qua đường.
Cảm biến ADAS hoạt động bằng cách gửi và nhận tín hiệu, sau đó xử lý dữ liệu để cung cấp thông tin hoặc phản hồi cho người lái xe hoặc phương tiện. Một số tính năng ADAS sử dụng dữ liệu từ một loại cảm biến, trong khi những tính năng khác sử dụng dữ liệu từ nhiều cảm biến để tạo ra cái nhìn chính xác và toàn diện hơn về môi trường. Quá trình này được gọi là phản ứng tổng hợp cảm biến.
Gặp lại anh em bạn bè sau bao năm xa cách, ngồi uống cốc trà kể chuyện cuộc sống mưu sinh.
Anh em ai cũng đã có gia đình , đã có những thành công trong sự nghiệp và đặc biệt đã và chuẩn bị làm bố trẻ con. Những tâm sự cùng những dự định sắp tới .
Mr Thắng trông vẫn phong độ như ngày nào, tuy tóc đã chấm nhiều sợi bạc vì áp lực công việc nhiều hơn, càng lên cao trách nhiệm càng nhiều , khối lượng công việc càng lớn ... và có thể nói là thành công nhất trong mấy ae " Thác Nôi" Nhóm vẫn duy trì hoạt động và chia sẻ cuộc sống hàng ngày của 5 ae
Anh Chương nhìn vẫn trẻ vậy , vẫn phong độ như xưa.
Chúc thì trông khoẻ mạnh trắng trẻo hơn, nhiều nỗi lo toan cuộc sống hơn xưa, vẫn cần cù chịu khó làm cv chuyên môn, r lại làm thêm để lo cho cuộc sống gia đình
Thế Anh tuy không được găp vì công việc và ở Hà nội nên ko tiện về .
Về Hà Nội đúng nơi đúng thời điểm và đã phát huy được hết sở trường và đạt được vị trí nhất định trong công ty .
Chẳng biết nói gì hơn chỉ biết : Cầu chúc anh em bạn bè sẽ thành công hơn nữa trong công việc và cuộc sống.
Mỗi người đều có một lựa chọn của riêng mình, một ước mơ cháy bỏng... Mong rằng ước mơ đó sẽ thành hiện thực, con đường đó sẽ luôn thuận buồm xuôi gió, dù có trở ngại cũng sẽ kiên trì vượt qua
"May mắn lớn nhất của cuộc đời không phải nhặt được tiền, cũng không phải trúng số, mà là có những người bạn dành thời gian để giúp bạn vươn tới nền tảng cao hơn"
Trong Hướng dẫn Arduino này, chúng ta sẽ tìm hiểu cách điều khiển động cơ DC bằng Arduino. Chúng tôi cũng xem xét một số kỹ thuật cơ bản để điều khiển động cơ DC và đưa ra hai ví dụ thông qua đó chúng tôi sẽ tìm hiểu cách điều khiển động cơ DC bằng trình điều khiển L298N và board Arduino.
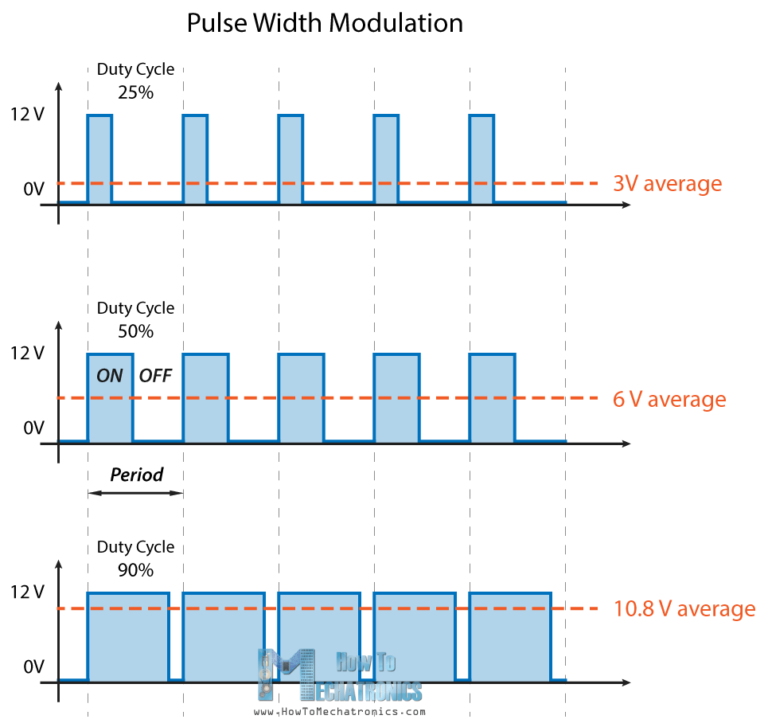
Điều khiển động cơ PWM DC
Chúng ta có thể điều khiển tốc độ của động cơ DC bằng cách điều khiển điện áp đầu vào của động cơ và phương pháp phổ biến nhất để làm điều đó là sử dụng tín hiệu PWM.
PWM hay thay đổi độ rộng xung là một kỹ thuật cho phép chúng ta điều chỉnh giá trị trung bình của điện áp đến thiết bị điện tử bằng cách bật và tắt nguồn với tốc độ nhanh. Điện áp trung bình phụ thuộc vào chu kỳ xung, hoặc lượng thời gian tín hiệu BẬT so với lượng thời gian tín hiệu TẮT trong một khoảng thời gian quy định.
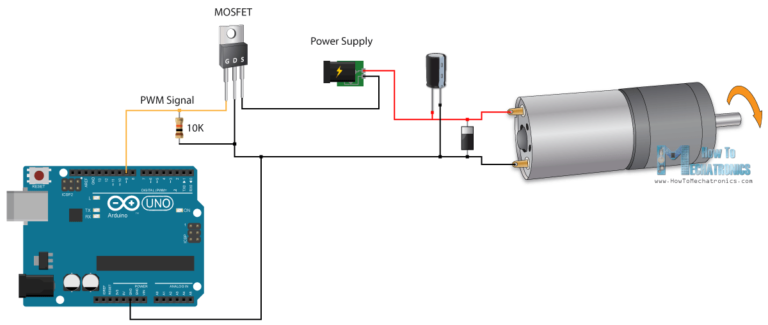
Vì vậy: Tùy thuộc vào kích thước của động cơ, chúng ta có thể chỉ cần kết nối đầu ra Arduino với chân cua điện trở hoặc chân của MOSFET và điều khiển tốc độ của động cơ bằng cách điều khiển đầu ra PWM. Tín hiệu Arduino công suất thấp bật và tắt chân tại MOSFET thông qua đó động cơ công suất cao được điều khiển.
Sơ đồ mạch điều khiển động cơ Arduino PWM DC
Lưu ý:Arduino GND và nguồn cung cấp năng lượng động cơ GND nên được kết nối với nhau.
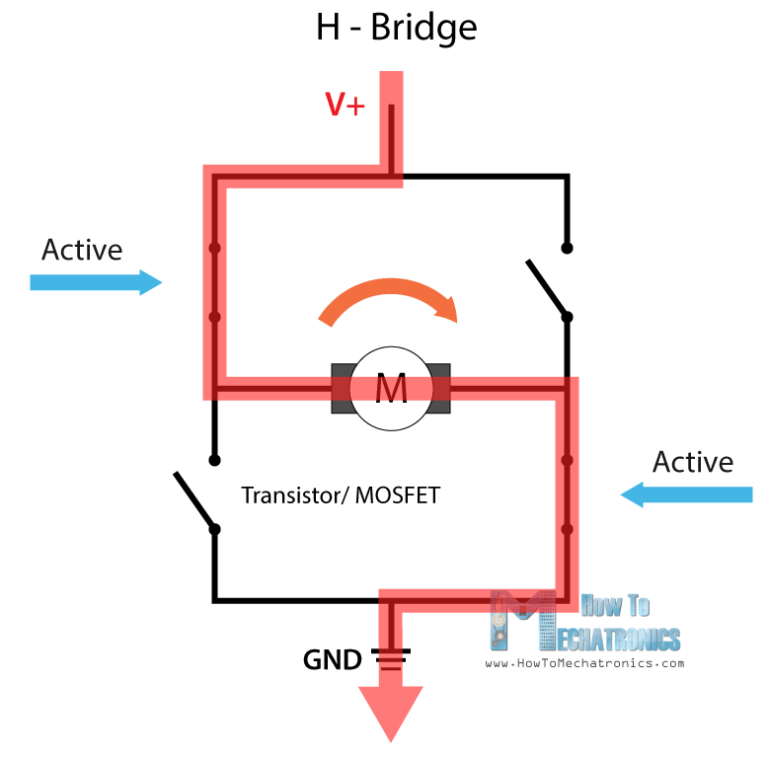
Điều khiển động cơ DC bằng mạch cầu H
Mặt khác, để điều khiển hướng quay, chúng ta chỉ cần đảo ngược hướng của dòng điện qua động cơ, và phương pháp phổ biến nhất để làm điều đó là sử dụng mạch cầu H. Một mạch cầu H chứa bốn chân chuyển mạch, điện trở hoặc MOSFET, với động cơ ở trung tâm tạo thành một cấu hình giống như chữ H. Bằng cách kích hoạt hai công tắc cụ thể cùng một lúc, chúng ta có thể thay đổi hướng của dòng điện, do đó thay đổi hướng quay của động cơ.
Vì vậy, nếu chúng ta kết hợp hai phương thức này, PWM và H-Bridge, chúng ta có thể kiểm soát hoàn toàn động cơ DC. Có nhiều trình điều khiển động cơ DC có các tính năng này và L298N là một trong số đó.
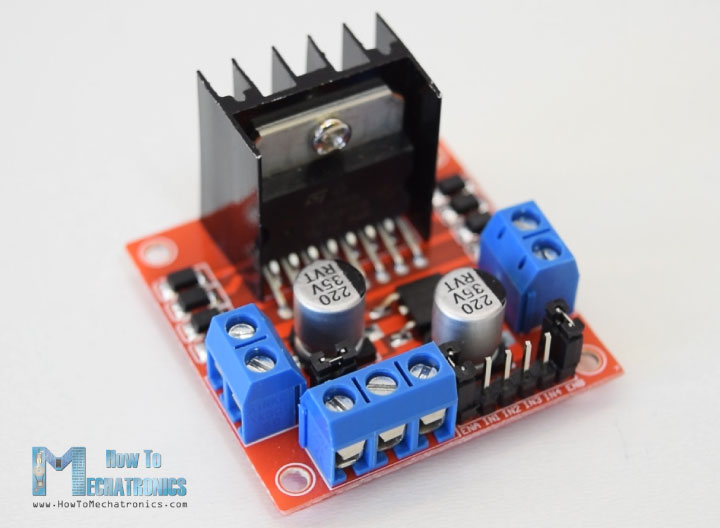
Chip L298N
L298N là trình điều khiển động cơ H-Bridge kép cho phép điều khiển tốc độ và hướng của hai động cơ DC cùng một lúc. Mô-đun có thể điều khiển động cơ DC có điện áp trong khoảng từ 5 đến 35V, với dòng điện cực đại lên đến 2A.
Trình điều khiển động cơ cầu đôi L298N
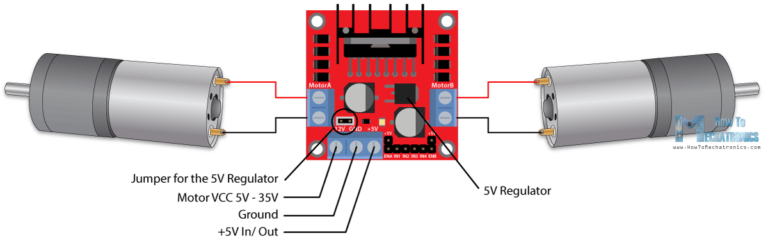
Chúng ta hãy xem xét kỹ hơn về sơ đồ chân của mô-đun L298N và giải thích cách thức hoạt động của nó. Mô-đun này có hai nhóm chân cho động cơ A và B, và một chân ở giữa cho chân Ground, VCC cho động cơ và chân 5V có thể là đầu vào hoặc đầu ra.
Điều này phụ thuộc vào điện áp được sử dụng tại động cơ VCC. Mô-đun này có bộ điều chỉnh 5V trên board được bật hoặc tắt bằng cách sử dụng dây nối. Nếu điện áp cung cấp động cơ lên đến 12V, chúng ta có thể kích hoạt bộ điều chỉnh 5V và chân 5V có thể được sử dụng làm đầu ra, ví dụ để cấp nguồn cho board Arduino của chúng ta. Nhưng nếu điện áp động cơ lớn hơn 12V, chúng ta phải ngắt kết nối dây vì những điện áp đó sẽ làm hỏng cho bộ điều chỉnh 5V trên board. Trong trường hợp này, chân 5V sẽ được sử dụng làm đầu vào vì chúng ta cần kết nối nó với nguồn điện 5V để IC hoạt động bình thường.
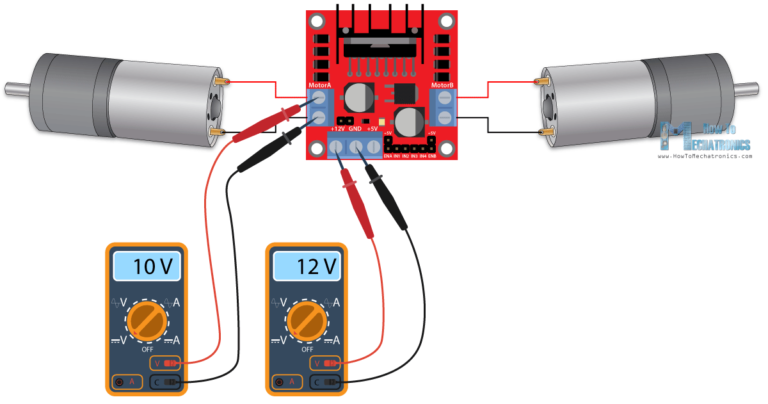
Chúng ta có thể lưu ý ở đây rằng IC này làm giảm điện áp khoảng 2V. Vì vậy, ví dụ, nếu chúng ta sử dụng nguồn điện 12V, điện áp tại các chân động cơ sẽ vào khoảng 10V, điều đó có nghĩa là chúng ta sẽ không thể cung cấp tốc độ tối đa ra khỏi động cơ DC.
Giảm điện áp L298N
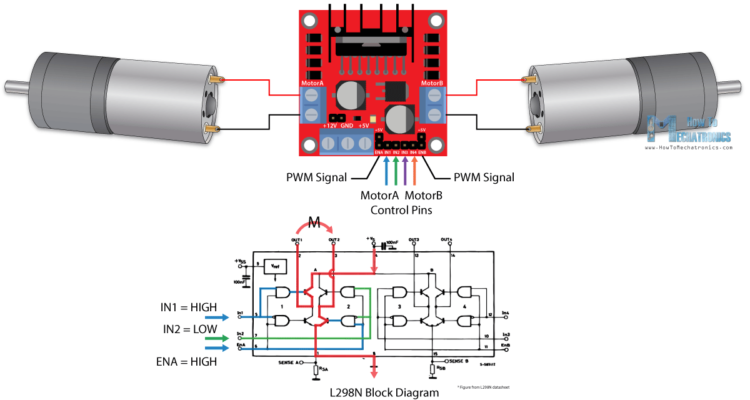
Tiếp theo là các đầu vào điều khiển logic. Các chân Bật A và Bật B được sử dụng để bật và kiểm soát tốc độ của động cơ. Nếu một dây có mặt trên chân này, động cơ sẽ được kích hoạt và hoạt động ở tốc độ tối đa, và nếu chúng ta loại bỏ dây, chúng ta có thể kết nối một đầu vào PWM với chân này và theo cách đó kiểm soát tốc độ của động cơ. Nếu chúng ta kết nối chân này với Ground, động cơ sẽ bị vô hiệu hóa.
Sơ đồ khối L298N Lưu lượng hiện tại và Cách hoạt động
Tiếp theo, các chân Đầu vào 1 và Đầu vào 2 được sử dụng để điều khiển hướng quay của động cơ A và đầu vào 3 và 4 cho động cơ B. Sử dụng các chân này, chúng tôi thực sự điều khiển các công tắc của mạch cầu H bên trong IC L298N. Nếu đầu vào 1 ở mức THẤP và đầu vào 2 là CAO thì động cơ sẽ di chuyển về phía trước và ngược lại, nếu đầu vào 1 ở mức CAO và đầu vào 2 ở mức THẤP thì động cơ sẽ di chuyển lùi. Trong trường hợp cả hai đầu vào đều giống nhau, cùng THẤP hoặc CAO, động cơ sẽ dừng. Điều tương tự áp dụng cho đầu vào 3 và 4 và động cơ B.
Arduino và L298N
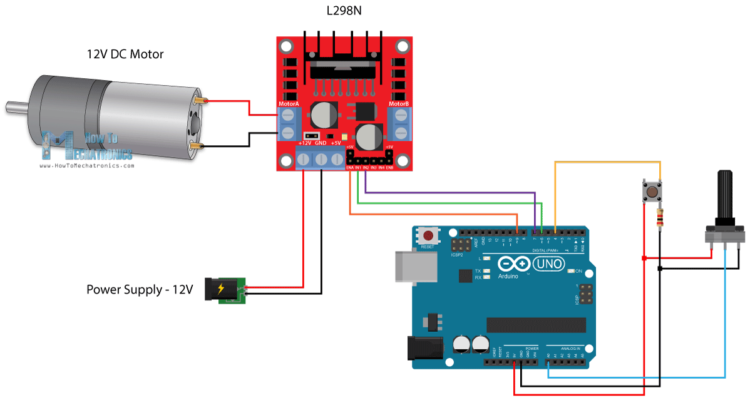
Bây giờ hãy làm một số ứng dụng thực tế. Trong ví dụ đầu tiên, chúng tôi sẽ điều khiển tốc độ của động cơ bằng biến trở và thay đổi hướng quay bằng nút ấn. Đây là sơ đồ mạch.
Sơ đồ mạch Arduino và L298N Điều khiển động cơ DC
Vì vậy: chúng ta cần một trình điều khiển L298N, động cơ DC, biến trở, nút ấn và board Arduino.
Các linh kiện cần thiết:
Bộ điều khiển L298N
Động cơ DC 12 V
Board Arduino
Breadboard và dây nối
Code Arduino
Đây là mã Arduino:
#define enA 9
#define in1 6
#define in2 7
#define button 4
int rotDirection = 0;
int pressed = false;
void setup() {
pinMode(enA, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(button, INPUT);
// Set initial rotation direction
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
}
void loop() {
int potValue = analogRead(A0); // Read potentiometer value
int pwmOutput = map(potValue, 0, 1023, 0 , 255); // Map the potentiometer value from 0 to 255
analogWrite(enA, pwmOutput); // Send PWM signal to L298N Enable pin
// Read button - Debounce
if (digitalRead(button) == true) {
pressed = !pressed;
}
while (digitalRead(button) == true);
delay(20);
// If button is pressed - change rotation direction
if (pressed == true & rotDirection == 0) {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
rotDirection = 1;
delay(20);
}
// If button is pressed - change rotation direction
if (pressed == false & rotDirection == 1) {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
rotDirection = 0;
delay(20);
}
}
Mô tả: Vì vậy, trước tiên chúng ta cần xác định các chân và một số biến cần thiết cho chương trình. Trong phần thiết lập, chúng ta cần đặt các chế độ chân và hướng quay ban đầu của động cơ. Trong phần vòng lặp, chúng tôi bắt đầu bằng cách đọc giá trị biến trở và sau đó ánh xạ giá trị mà chúng tôi nhận được từ 0 đến 1023, giá trị từ 0 đến 255 cho tín hiệu PWM, hoặc đó là chu kỳ nhiệm vụ 0 đến 100% của Tín hiệu PWM. Sau đó, bằng cách sử dụng chức năng analogWrite (), chúng tôi gửi tín hiệu PWM đến chân Bật của board L298N, điều khiển động cơ.
Tiếp theo, chúng tôi kiểm tra xem chúng tôi đã nhấn nút chưa và nếu đã bật, chúng tôi sẽ thay đổi hướng quay của động cơ bằng cách đặt trạng thái Đầu vào 1 và Đầu vào 2 ngược lại. Nút ấn sẽ hoạt động như nút chuyển đổi và mỗi lần chúng ta nhấn nó, nó sẽ thay đổi hướng quay của động cơ.
Điều khiển xe Arduino bằng bộ điều khiển L298N
Vì vậy, một khi chúng ta đã biết được điều này, bây giờ chúng ta có thể chế tạo chiếc xe robot Arduino của riêng mình. Đây là sơ đồ mạch:
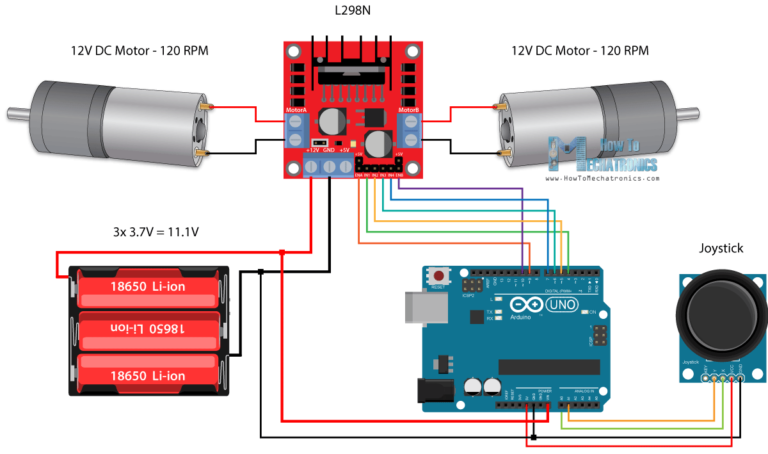
Điều khiển xe Arduino sử dụng sơ đồ mạch điều khiển L298N
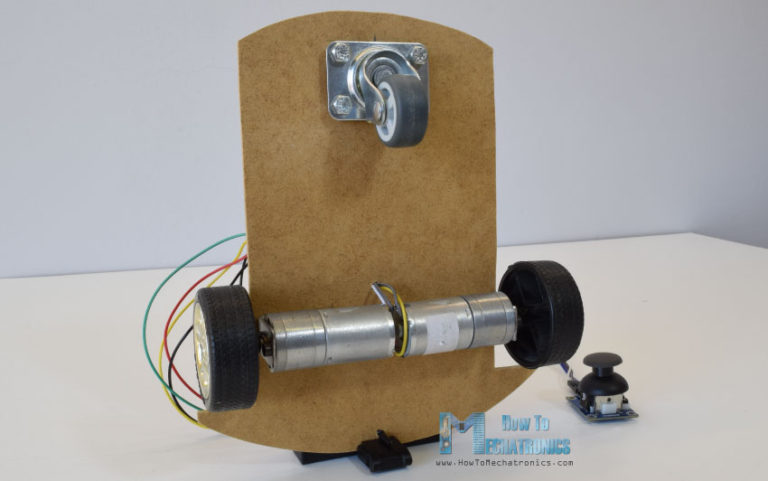
Tất cả những gì chúng ta cần là 2 Motor DC, trình điều khiển L298N, board Arduino và cần điều khiển. Về nguồn điện, tôi chọn sử dụng ba pin Li-ion 3.7V, cung cấp tổng cộng 11V. Tôi đã làm cho khung xe bằng ván ép dày 3 mm, gắn các động cơ vào nó bằng khung kim loại, gắn bánh xe vào động cơ và phía trước gắn một bánh xe xoay.
Arduino Robot Car DIY Khung gầm
Bây giờ chúng ta hãy xem code Arduino và xem nó hoạt động như thế nào.
int xAxis = analogRead(A0); // Read Joysticks X-axis
int yAxis = analogRead(A1); // Read Joysticks Y-axis
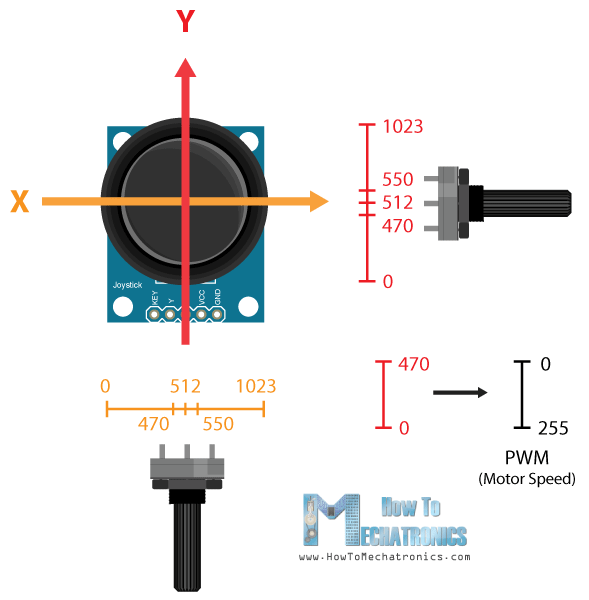
Sau khi xác định các chân, trong phần vòng lặp, chúng ta bắt đầu với việc đọc các giá trị trục X và Y của phím điều khiển. Cần điều khiển thực sự được làm bằng hai biến trở được kết nối với đầu vào analog của Arduino và chúng có giá trị từ 0 đến 1023. Khi cần điều khiển ở vị trí trung tâm, giá trị của cả hai biến trở hoặc trục là khoảng 512.
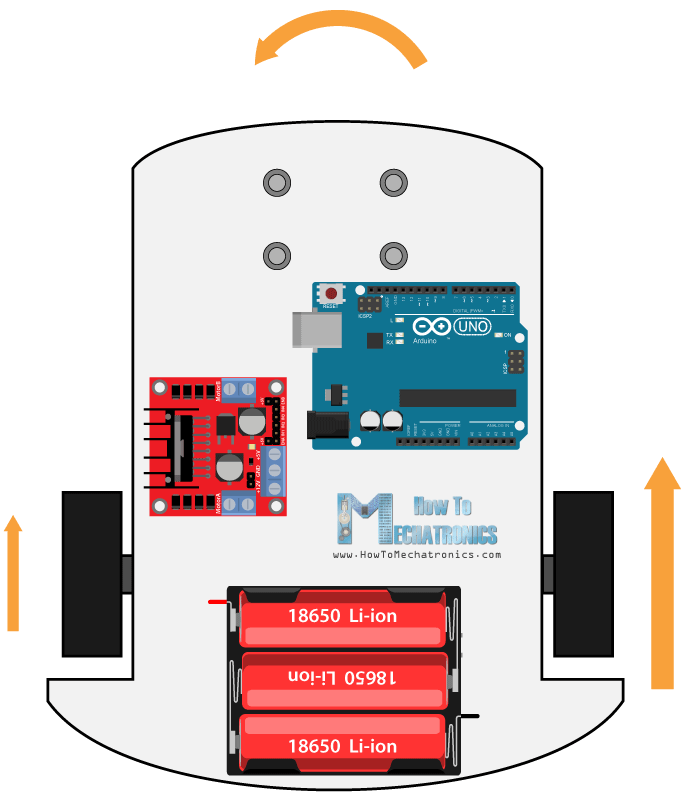
Điều khiển chuyển động xe Arduino
Chúng tôi sẽ thêm một chút dung sai và có giá trị từ 470 đến 550 là chính. Vì vậy, nếu chúng ta di chuyển trục Y của phím điều khiển lùi và giá trị xuống dưới 470, chúng ta sẽ đặt hướng quay của hai động cơ về phía sau bằng bốn chân đầu vào. Sau đó, chúng tôi sẽ chuyển đổi các giá trị giảm dần từ 470 thành 0 thành tăng giá trị PWM từ 0 đến 255, đây là tốc độ của động cơ.
// Y-axis used for forward and backward control
if (yAxis < 470) {
// Set Motor A backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Set Motor B backward
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Convert the declining Y-axis readings for going backward from 470 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 470, 0, 0, 255);
motorSpeedB = map(yAxis, 470, 0, 0, 255);
}
Tương tự, nếu chúng ta di chuyển trục Y của cần điều khiển về phía trước và giá trị vượt quá 550, chúng ta sẽ có các động cơ di chuyển về phía trước và chuyển đổi số đọc từ 550 sang 1023 thành giá trị PWM từ 0 đến 255. Nếu cần điều khiển ở giữa tốc độ động cơ sẽ bằng không.
Tiếp theo, hãy xem cách chúng tôi sử dụng trục X cho điều khiển bên trái và bên phải của xe.
// X-axis used for left and right control
if (xAxis < 470) {
// Convert the declining X-axis readings from 470 to 0 into increasing 0 to 255 value
int xMapped = map(xAxis, 470, 0, 0, 255);
// Move to left - decrease left motor speed, increase right motor speed
motorSpeedA = motorSpeedA - xMapped;
motorSpeedB = motorSpeedB + xMapped;
// Confine the range from 0 to 255
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}
Vì vậy, một lần nữa, trước tiên chúng ta cần chuyển đổi số đọc trục X thành giá trị tốc độ từ 0 đến 255. Để di chuyển sang trái, chúng tôi sử dụng giá trị này để giảm tốc độ động cơ bên trái và tăng tốc độ động cơ bên phải. Ở đây, do các hàm số học, chúng tôi sử dụng hai câu lệnh if để giới hạn phạm vi tốc độ động cơ từ 0 đến 255.
Arduino Robot Xe điều khiển trái và phải
Phương pháp tương tự được sử dụng để di chuyển xe sang phải.
Tùy thuộc vào điện áp ứng dụng và động cơ chính, ở tốc độ thấp hơn, động cơ không thể bắt đầu di chuyển và nó tạo ra âm thanh ù. Trong trường hợp của tôi, các động cơ không thể di chuyển nếu giá trị của tín hiệu PWM dưới 70. Do đó, sử dụng hai câu lệnh if này tôi đã giới hạn ở phạm vi tốc độ từ 70 đến 255. Cuối cùng, chúng tôi chỉ gửi tốc độ động cơ cuối cùng hoặc Tín hiệu PWM đến các chân cho phép của trình điều khiển L298N.
// Prevent buzzing at low speeds (Adjust according to your motors. My motors couldn't start moving if PWM value was below value of 70)
if (motorSpeedA < 70) {
motorSpeedA = 0;
}
if (motorSpeedB < 70) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); // Send PWM signal to motor A
analogWrite(enB, motorSpeedB); // Send PWM signal to motor B
Đây là code hoàn chỉnh của ví dụ xe robot Arduino:
#define enA 9
#define in1 4
#define in2 5
#define enB 10
#define in3 6
#define in4 7
int motorSpeedA = 0;
int motorSpeedB = 0;
void setup() {
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
int xAxis = analogRead(A0); // Read Joysticks X-axis
int yAxis = analogRead(A1); // Read Joysticks Y-axis
// Y-axis used for forward and backward control
if (yAxis < 470) {
// Set Motor A backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Set Motor B backward
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Convert the declining Y-axis readings for going backward from 470 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 470, 0, 0, 255);
motorSpeedB = map(yAxis, 470, 0, 0, 255);
}
else if (yAxis > 550) {
// Set Motor A forward
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// Set Motor B forward
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// Convert the increasing Y-axis readings for going forward from 550 to 1023 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 550, 1023, 0, 255);
motorSpeedB = map(yAxis, 550, 1023, 0, 255);
}
// If joystick stays in middle the motors are not moving
else {
motorSpeedA = 0;
motorSpeedB = 0;
}
// X-axis used for left and right control
if (xAxis < 470) {
// Convert the declining X-axis readings from 470 to 0 into increasing 0 to 255 value
int xMapped = map(xAxis, 470, 0, 0, 255);
// Move to left - decrease left motor speed, increase right motor speed
motorSpeedA = motorSpeedA - xMapped;
motorSpeedB = motorSpeedB + xMapped;
// Confine the range from 0 to 255
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}
if (xAxis > 550) {
// Convert the increasing X-axis readings from 550 to 1023 into 0 to 255 value
int xMapped = map(xAxis, 550, 1023, 0, 255);
// Move right - decrease right motor speed, increase left motor speed
motorSpeedA = motorSpeedA + xMapped;
motorSpeedB = motorSpeedB - xMapped;
// Confine the range from 0 to 255
if (motorSpeedA > 255) {
motorSpeedA = 255;
}
if (motorSpeedB < 0) {
motorSpeedB = 0;
}
}
// Prevent buzzing at low speeds (Adjust according to your motors. My motors couldn't start moving if PWM value was below value of 70)
if (motorSpeedA < 70) {
motorSpeedA = 0;
}
if (motorSpeedB < 70) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); // Send PWM signal to motor A
analogWrite(enB, motorSpeedB); // Send PWM signal to motor B
}
Cho một số bạn chưa biết: RS là viết tắt của Recommended Standard (Tiêu chuẩn khuyến nghị). Các số 232/485 phía sau chữ RS là một phần của danh sách các tiêu chuẩn chất lượng EIA (Hiệp hội doanh nghiệp điện tử).
🔥Chuẩn kết nối RS232
Cổng kết nối RS232 thường được gọi là cổng COM. Chuẩn kết nối này xuất hiện mặt định trên các dòng máy tính để bàn (PC) hoặc một số Laptop. Chuẩn kết nối RS232 (COM) được kết nối máy tính với các máy in, máy Fax,…
Chuẩn kết nối RS232 gồm có 3 dây : Tx (dây truyền), Rx (nhận tín hiệu), GND (dây nối đất). RS232 hoạt động dựa trên sự chênh lệch điện áp TX, RX, GND.
Nhược điểm chuẩn kết nối RS232 : Khoảng cách truyền ngắn, tối đa 15m. Nguyên nhân là do mất mass không thể phục hồi được. Việc kết nối theo tiêu chuẩn RS232 chỉ thực hiện kết nối giữa 2 thiết bị với nhau (point – to – point), nên hạn chế kết nối nhiều thiết bị với nhau.
🔥Chuẩn kết nối Modbus RS485
Chuẩn Modbus RS485 chỉ truyền tín hiệu trên 2 dây A và B, nguyên lý hoạt động dựa trên sự chênh lệch áp giữa A và B theo Logic 0 hoặc 1 chứ không so sánh với mass (nối đất).
Điều này đảm bảo tín hiệu truyền đi xa mà không lo sụt áp như RS232. Bởi nếu có xảy ra sụt áp thì trên cả 2 dây điều sụt áp như nhau, nên tín hiệu vẫn đảm bảo Logic 0 và 1.
Giả sử : A và B xảy ra 2 trường hợp sau :
A=1 và B=0 thì dữ liệu nhận biết data bằng 1
A=0 và B=1 thì dữ liệu nhận biết data bằng 0
👉Theo cách so sánh trên thì khi điện áp bị suy giảm thì sự chênh lệch điện áp vẫn không đổi. Chính vì thế mà tín hiệu truyền trên RS485 có thể truyền đi rất xa mà vẫn chính xác.
Sự chênh lệch điện áp giữa A và B trong khoảng -1,6V đến -6V thì dữ liệu nhận biết data tương ứng với mức 1.
Sự chênh lệch điện áp giữa A và B trong khoảng +1,5 đến +6V thì dữ liệu nhận biết data tương ứng với mức 0.
🔥Sự Khác Nhau Giữa RS232 Và RS485 Là Gì?
RS232 và RS485 có 3 điểm khác nhau chính đó là:
✓Chuẩn kết nối RS232 hoạt động dựa trên sự chênh lệch điện áp so với mass. Modbus RS485 cũng hoạt động trên sự chênh lệch điện áp nhưng chỉ trên 2 dây A và B theo nguyên lý Logic 0 và 1.
✓ Modbus RS232 chỉ cho phép truyền theo phương thức điểm – điểm (2 thiết bị với nhau). Còn RS485 kết nối đa điểm (nhiều thiết bị trên một đường truyền)
✓ Về khoảng cách truyền RS232 tốc độ nhanh (20Mbit/s), nhưng khoảng cách truyền ngắn. Ngược lại RS485 khoảng cách truyền xa, nhưng tốc độ đáp ứng chậm (10Mbit/s)
Mặc dù đã nghỉ nhưng kỷ niệm về automation 2p vẫn luôn trong tâm trí . nơi t được làm chính tôi nơi có những người anh em tốt nhất từ khi t bắt đầu đi làm















 8:05 AM
8:05 AM
 asahi
asahi


 Posted in:
Posted in: